警告與免責聲明:
如果您沒有任何基本電子知識,請不要嘗試這篇教學。作者對本教學所導致的任何損害概不負責。嘗試這篇教學風險自負。
底下將使用一顆STC89C52RC單晶片、一個HC-06 UART介面藍牙模組與一個L298N馬達驅動模組來打造一台藍牙遙控玩具車。此遙控車要搭配『Bluetooth Remote Toy』APP才能使用,如此一來,你就可以透過手機藍牙來控制玩具車。底下是遙控車的控制指令:
每個命令都是由一個Byte組成。如果您要停止某個動作,則在該動作指令和停止/關閉指令之間執行OR操作。例如,
- 0x01000100(前進)| 0x00100000(停止)= 0x01100100,將發送到遙控車使它停止前進。
- 0x01001000(大燈) | 0x00100000(關掉) = 0x01101000,將發送到遙控車使它關掉大燈。
紅色、綠色和藍色按鈕保留給那些想要執行額外操作的人。
| 控制功能 | 指令 |
|---|---|
| 紅色按鈕 | 0x01000001 |
| 綠色按鈕 | 0x01000010 |
| 藍色按鈕 | 0x01000011 |
| 前進 | 0x01000100 |
| 後退 | 0x01000101 |
| 右轉 | 0x01000110 |
| 左轉 | 0x01000111 |
| 大燈 | 0x01001000 |
| 尾燈 | 0x01001001 |
| 停止/關掉 | 0x00100000 |
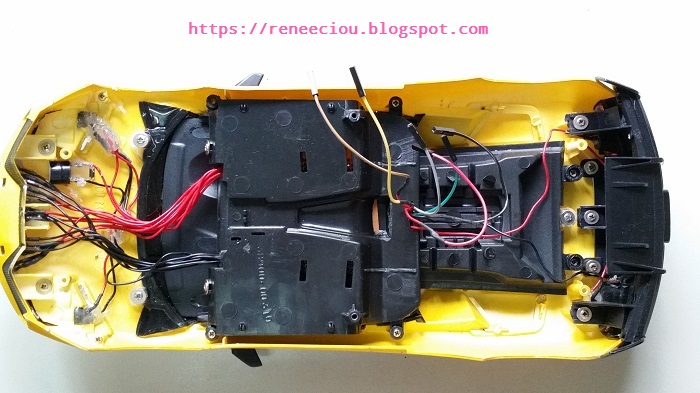
購買這款玩具車後,我用8051電路替代了原本的RF電路。玩具車前後共兩顆直流馬達,前馬達用於控制方向(左/右),後馬達用於控制前進和後退。HC-06藍牙模組用於接收Android手機端傳來的指令。L298N H-bridge 模組可以讓您控制兩顆直流馬達的速度和方向。STC89C52RC單晶片用於控制整個系統。
L298N H-bridge模組
關於此模塊的更多詳細資訊,請閱讀這裡。我建議您在開始之前先閱讀一下。
接腳說明
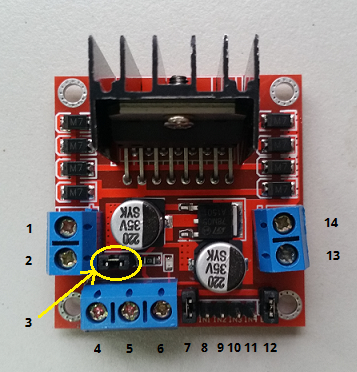
- 前直流馬達 "+"
- 前直流馬達 "-"
- 12V跳線 - 對於本教程,請保留這跳線。
- 在這裡連接馬達電源電壓,並使用7 ~ 12V直流電壓驅動本教程的馬達。
- GND - 接地
- 5V輸出 - 如果您使用7 ~ 12V直流電壓驅動馬達,並且保留12V跳線,則該模組還可以為您的8051單晶片提供5V直流電壓。
- ENA - 前直流馬達啟用跳線(Enable Jumper)。對於本教程,請保留這跳線。如果要控制前直流馬達的速度,則必須將MCU的PWM輸出連接到ENA。對於STC89C52RC單晶片是沒有PWM輸出。但是如果需要,您可以使用timer在8051上實現PWM。
- IN1 - 前直流馬達的方向。
- IN2 - 前直流馬達的方向。
- IN3 - 後直流馬達的方向。
- IN4 - 後直流馬達的方向。
- ENB - 後直流馬達啟用跳線(Enable Jumper)。對於本教程,請保留這跳線。如果要控制後直流馬達的速度,則必須將MCU的PWM輸出連接到ENB。對於STC89C52RC單晶片是沒有PWM輸出。但是如果需要,您可以使用timer在8051上實現PWM。
- 後直流馬達 "+"
- 後直流馬達 "-"
前馬達真值表
| ENB | IN3 | IN4 | 說明 |
|---|---|---|---|
| 0 | N/A | N/A | Off |
| 1 | 0 | 0 | 停止 |
| 1 | 0 | 1 | 反轉 |
| 1 | 1 | 0 | 正轉 |
| 1 | 1 | 1 | 剎住 |
後馬達真值表
| ENA | IN1 | IN2 | 說明 |
|---|---|---|---|
| 0 | N/A | N/A | Off |
| 1 | 0 | 0 | 停止 |
| 1 | 0 | 1 | 反轉 |
| 1 | 1 | 0 | 正轉 |
| 1 | 1 | 1 | 剎住 |
為您的電源選擇合適的電壓是很重要,太低會導致性能下降,太高會損壞馬達,請確保電壓不超過馬達額定電壓。對於我的玩具車,我使用兩顆串聯連接的Panasonic NCR18650B 3.6 Volt 18650電池供電約7.2V。對於您的玩具車,請為您的電源選擇合適的電壓,這取決於您的馬達。
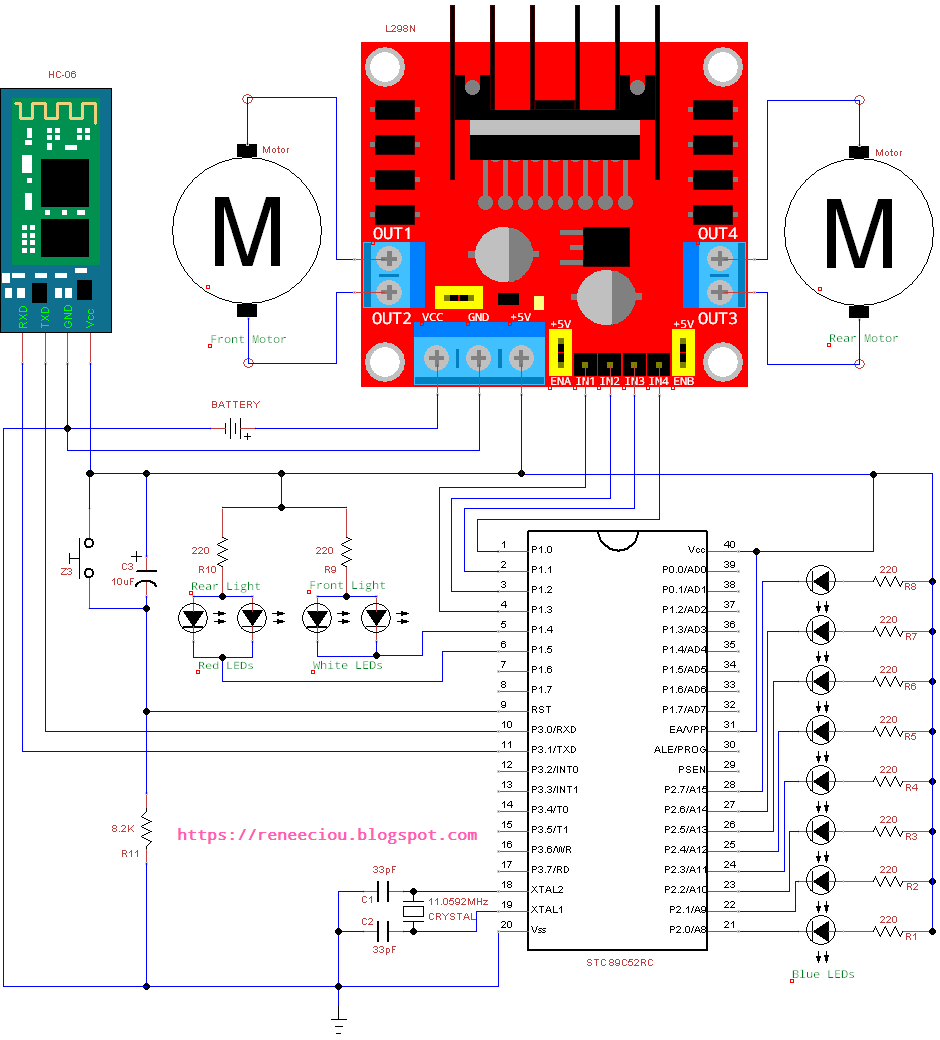
電路圖
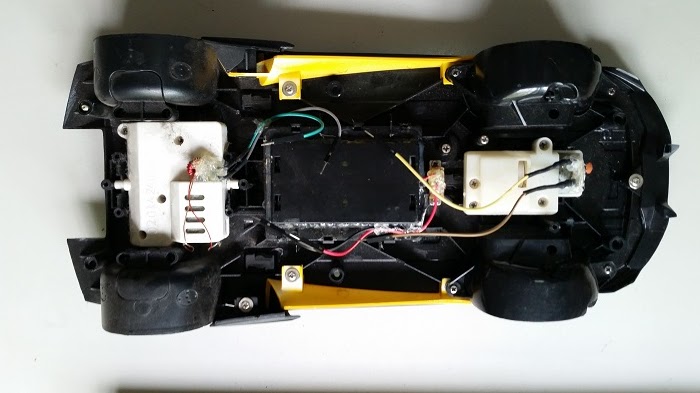
底下是我完成的成品。




底下是用組合語言寫的,你可用C語言改寫。8051的組合語言沒有很難,語法也沒有很多,剛開始學8051可以考慮用組合語言撰寫,這樣會比較了解8051,但如果程式碼越來越大,又考慮可讀性與移植性,建議用C語言撰寫。至於8051的開發環境,可以參考這裡。
程式碼
STOP BIT 20H
TURN BIT 21H
R_ON BIT 22H
G_ON BIT 23H
B_ON BIT 24H
B_STP BIT 25H
KP_MV BIT 26H
ORG 00H
AJMP START
ORG 23H ;Serial interrupt vector address
AJMP SERIAL_ROUTINE
ORG 2BH ;Timer2 interrupt vector address
AJMP TIMER2_ROUTINE
START:
ACALL INIT
ACALL INIT_SERIAL
ACALL INIT_TIMER2
LOOP:
ACALL DELAY
JNB B_ON, STOP_BLUE_LED
JB TURN, TURN_AROUND
MOV P2, A
RL A
CJNE A, #01111111B, SET_TURN_RIGHT
SETB TURN
AJMP LOOP
SET_TURN_RIGHT:
AJMP LOOP
TURN_AROUND:
MOV P2, A
RR A
CJNE A, #11111110B, SET_TURN_LEFT
CLR TURN
AJMP LOOP
SET_TURN_LEFT:
AJMP LOOP
STOP_BLUE_LED:
JNB B_STP, RESET_DONE
CLR B_STP
MOV A, #11111110B
CLR TURN
MOV P2, #255
RESET_DONE:
AJMP LOOP
;--------------------
; Delay
;--------------------
DELAY: MOV R6, #100
DLY1: MOV R7, #255
DLY2: DJNZ R7, DLY2
DJNZ R6, DLY1
RET
;--------------------
; Initialize variables
;--------------------
INIT:
MOV SP, #60H
CLR STOP
CLR TURN
CLR R_ON
CLR G_ON
CLR B_ON
CLR B_STP
MOV A, #11111110B
MOV P0, #0
MOV P1, #00110000B
MOV P2, #255
MOV R5, #15
RET
;--------------------
; Initialize serial
;
; TCON Register:
; 7 6 5 4 3 2 1 0
; TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0
;
; TMOD Register:
; 7 6 5 4 3 2 1 0
; GATE1 C/T1# M11 M01 GATE0 C/T0# M10 M00
;
; SCON Register:
; 7 6 5 4 3 2 1 0
; SM0 SM1 SM2 REN TB8 RB8 TI RI
;--------------------
INIT_SERIAL:
MOV SCON, #50H ;Mode 1: 8-bit UART
MOV TMOD, #20H ;Timer and reload mode
MOV TH1, #0FDH ;Baud rate 9600bps
MOV TL0, #0FDH ;Baud rate 9600bps
SETB TR1 ;Timer1 runs
SETB PS ;High interrupt priority
SETB ES ;Enable serial interrupt
RET
;---------------------------------------------------
; Initialize timer2
;
; T2CON Register:
; 7 6 5 4 3 2 1 0
; TF2 EXF2 RCLK TCLK EXEN2 TR2 C/T2 CP/RL2
;
; 1 second = 11.0592MHZ / 12 = 921600 = 61440 * 15
; TH2 = (65536-61440)/256 = 16 = 10H
; TL2 = (65536-61440)%256 = 0 = 00H
;
; 0.5 second = 30720 * 15
; TH2 = (65536-30720)/256 = 136 = 88H
; TL2 = (65536-30720)%256 = 0 = 00H
;
; 0.25 second = 15360 * 15
; TH2 = (65536-15360)/256 = 196 = C4H
; TL2 = (65536-15360)%256 = 0 = 00H
;
; IE Register:
; 7 6 5 4 3 2 1 0
; EA - ET2 ES ET1 EX1 ET0 EX0
;---------------------------------------------------
INIT_TIMER2:
CLR EXF2 ;Reset flag
CLR TCLK ;Disable baud rate generator
CLR RCLK ;Disable baud rate generator
CLR EXEN2 ;Ignore events on T2EX
MOV TH2, #0C4H
MOV RCAP2H, #0C4H
MOV TL2, #00H
MOV RCAP2L, #00H
CLR CT2 ;Timer mode
CLR CPRL2 ;Reload mode
CLR PT2 ;Low interrupt priority
SETB ET2 ;Enable timer2 interrupt
SETB EA ;Global interrupts enable
SETB TR2 ;Timer2 run
RET
;-----------------------------------
; Timer2 interrupt service routine
;
; This is very important for the toy
; car to stop all actions when the
; bluetooth signal of your toy car
; is out of range, and no command
; is received after (0.25 * 2) second.
;
;-----------------------------------
TIMER2_ROUTINE:
PUSH ACC ;Save ACC register on the stack
DJNZ R5, CONTINUE ;Continue timer if it is less then 1 second
JB KP_MV, NO_CLEAR
CLR P1.0 ;Stop forward
CLR P1.1 ;Stop backward
CLR P1.2 ;Stop right
CLR P1.3 ;Stop left
NO_CLEAR:
CLR KP_MV
MOV R5, #15 ;Recount 0.25 second
CONTINUE:
CLR TF2 ;Reset interrupt flag
POP ACC ;Restore ACC
RETI
;----------------------------------------
; Serial port interrupt service routine
;----------------------------------------
SERIAL_ROUTINE:
PUSH ACC
SETB KP_MV
MOV A, SBUF
JNB A.5, RED_BUTTON
SETB STOP
CLR A.5
RED_BUTTON:
CJNE A, #01000001B, GREEN_BUTTON
JB STOP, STOP_RED_BUTTON
SETB R_ON
LJMP EXIT
STOP_RED_BUTTON:
CLR R_ON
CLR STOP
LJMP EXIT
GREEN_BUTTON:
CJNE A, #01000010B, BLUE_BUTTON
JB STOP, STOP_GREEN_BUTTON
SETB G_ON
SJMP EXIT
STOP_GREEN_BUTTON:
CLR G_ON
CLR STOP
SJMP EXIT
BLUE_BUTTON:
CJNE A, #01000011B, FORWARD
JB STOP, STOP_BLUE_BUTTON
SETB B_ON
SJMP EXIT
STOP_BLUE_BUTTON:
CLR B_ON
CLR STOP
SETB B_STP
SJMP EXIT
FORWARD:
CJNE A, #01000100B, BACKWARD
JB STOP, STOP_FORWARD
SETB P1.0
SJMP EXIT
STOP_FORWARD:
CLR P1.0
CLR STOP
SJMP EXIT
BACKWARD:
CJNE A, #01000101B, RIGHT
JB STOP, STOP_BACKWARD
SETB P1.1
SJMP EXIT
STOP_BACKWARD:
CLR P1.1
CLR STOP
SJMP EXIT
RIGHT:
CJNE A, #01000110B, LEFT
JB STOP, STOP_RIGHT
SETB P1.2
SJMP EXIT
STOP_RIGHT:
CLR P1.2
CLR STOP
SJMP EXIT
LEFT:
CJNE A, #01000111B, CAR_FRONT_LIGHT
JB STOP, STOP_LEFT
SETB P1.3
SJMP EXIT
STOP_LEFT:
CLR P1.3
CLR STOP
SJMP EXIT
CAR_FRONT_LIGHT:
CJNE A, #01001000B, CAR_REAR_LIGHT
JB STOP, STOP_FRONT_LIGHT
CLR P1.4
SJMP EXIT
STOP_FRONT_LIGHT:
SETB P1.4
CLR STOP
SJMP EXIT
CAR_REAR_LIGHT:
CJNE A, #01001001B, EXIT
JB STOP, STOP_REAR_LIGHT
CLR P1.5
SJMP EXIT
STOP_REAR_LIGHT:
SETB P1.5
CLR STOP
EXIT:
CLR RI
POP ACC
RETI
END
Demo
警告與免責聲明:
如果您沒有任何基本電子知識,請不要嘗試這篇教學。作者對本教學所導致的任何損害概不負責。嘗試這篇教學風險自負。
沒有留言:
不接受新意見。